


步进电机直线推杆(SMLA)将步进电机、精密梯形丝杠和螺母组合在一个紧凑的外壳中,为直线运动提供了一种高度可配置、可定制和稳健的解决方案。在运动控制器和步进驱动器的帮助下,所有SMLA都可以通过编程将负载定位到精确位置。然而,标准配置并不提供反馈机制来告诉操作人员是否已完成运动。
尽管反馈对于许多应用来说并非必需,但反馈是一种可以在更复杂的直线运动系统中使用的强大工具。为此,鉴于对精确负载定位信息的需求不断增长,为SMLA配备编码器可能是获取您应用实时运动反馈的一种有效且简单的解决方案。
SMLA核心配置
图1显示了三种常见的SMLA结构:电动梯形丝杠(MLS)、电动梯形螺母(MLN)和电动直线推杆(MLA)。这些结构的核心都具有一个步进电机、梯形丝杠和螺母,但在获得运动的方式上有所不同。
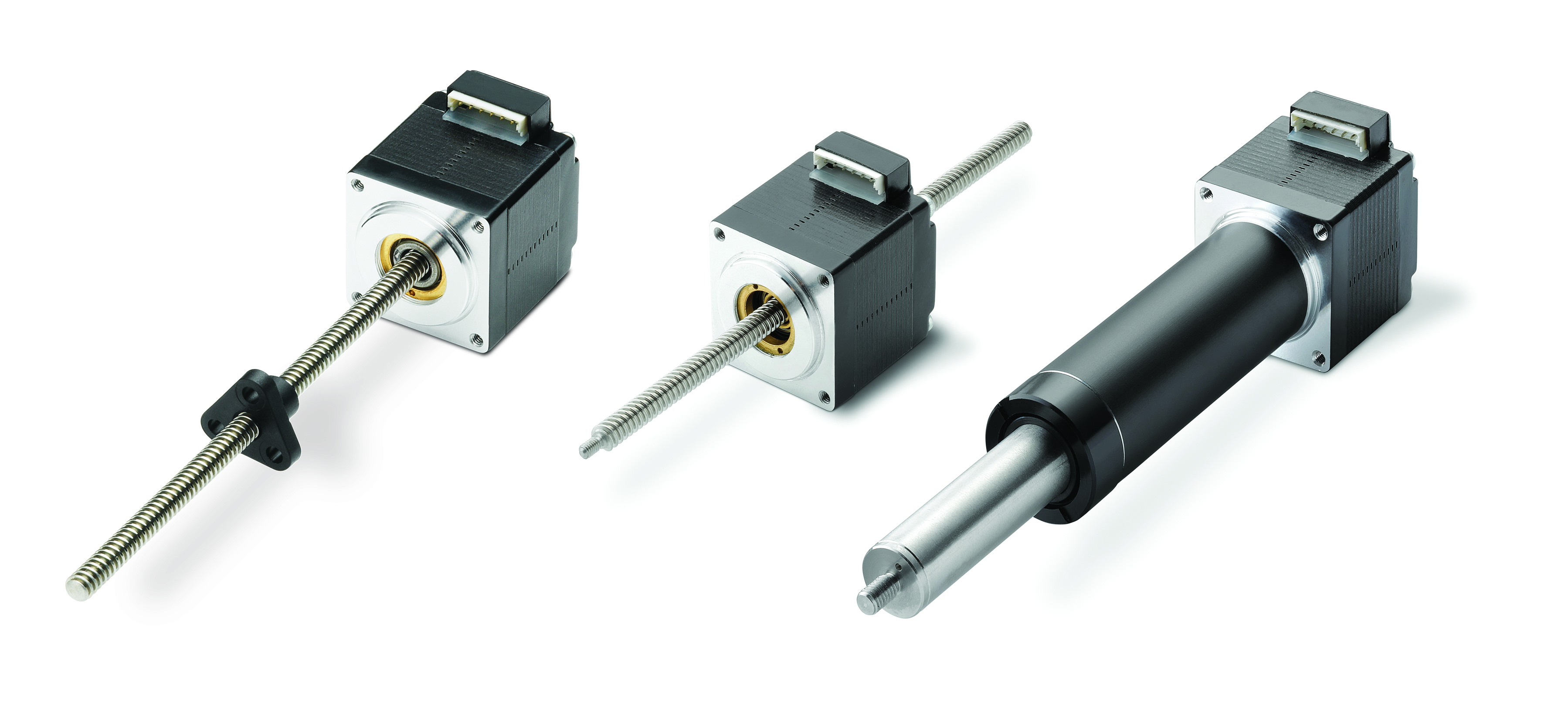
图1.SMLA类型(从左到右:MLS、MLN和MLA)。图片由Thomson Industries,Inc.提供
对于MLS装置,梯形丝杠直接连接到电机轴上,电机轴在旋转时平移螺母。MLN装置将螺母集成在电机轴内,当旋转时,会平移梯形丝杠而不是螺母。MLA配置本质上是带有附加组件的MLS单元,这些组件可容纳梯形丝杠和螺母,同时还集成了支撑和导向功能。
开环直线推杆
图2描述了适用于所有配置的开环SMLA架构。用户通过人机界面(HMI)与系统交互。他们将所需的运动序列编程到运动控制器中,运动控制器将其发送到步进电机驱动器进行转换和放大,然后再将其传输到SMLA实现运动。通信途径是单向的,运动控制器和HMI都不会收到任何表示预期的移动已成功完成的反馈通知。
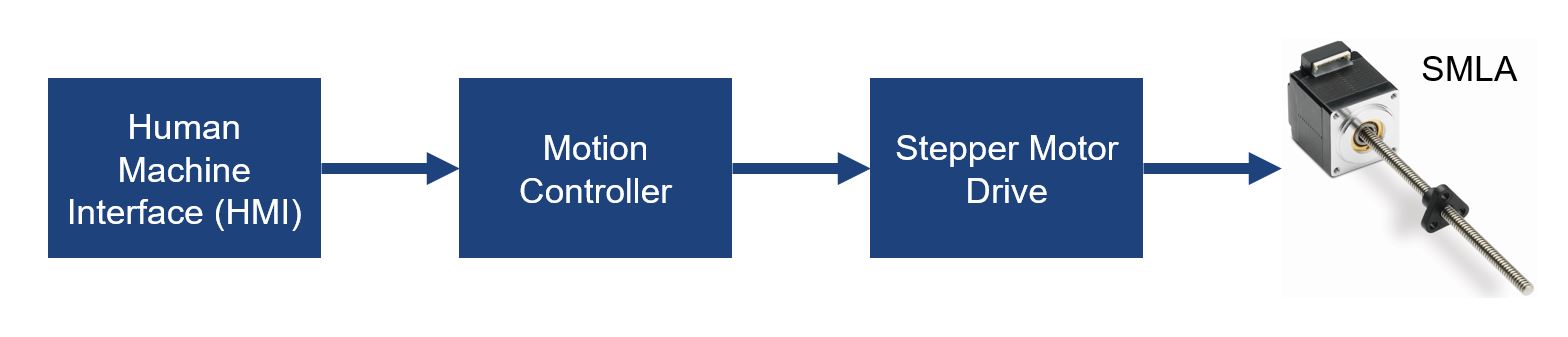
图2:用于驱动SMLA的基本开环系统设置架构。图片由Thomson Industries,Inc. 提供
准确了解负载的位置对医疗仪器、测量装置和实验室设备等众多高精度应用而言至关重要。此外,某些应用可能会遇到意外关闭电源或负载被强制脱离位置的情况。在这种情况下,如果不使用反馈机制,就不可能知道负载的确切位置。
从编码器功能中获益的一个很好应用示例是自动移液机。(图 3)这些设备利用水平轴上的编码器来准确跟踪分液移液器的位置,并确保液体转移到正确的试管中。其他示例包括流体泵、3D打印机和XY载物台。
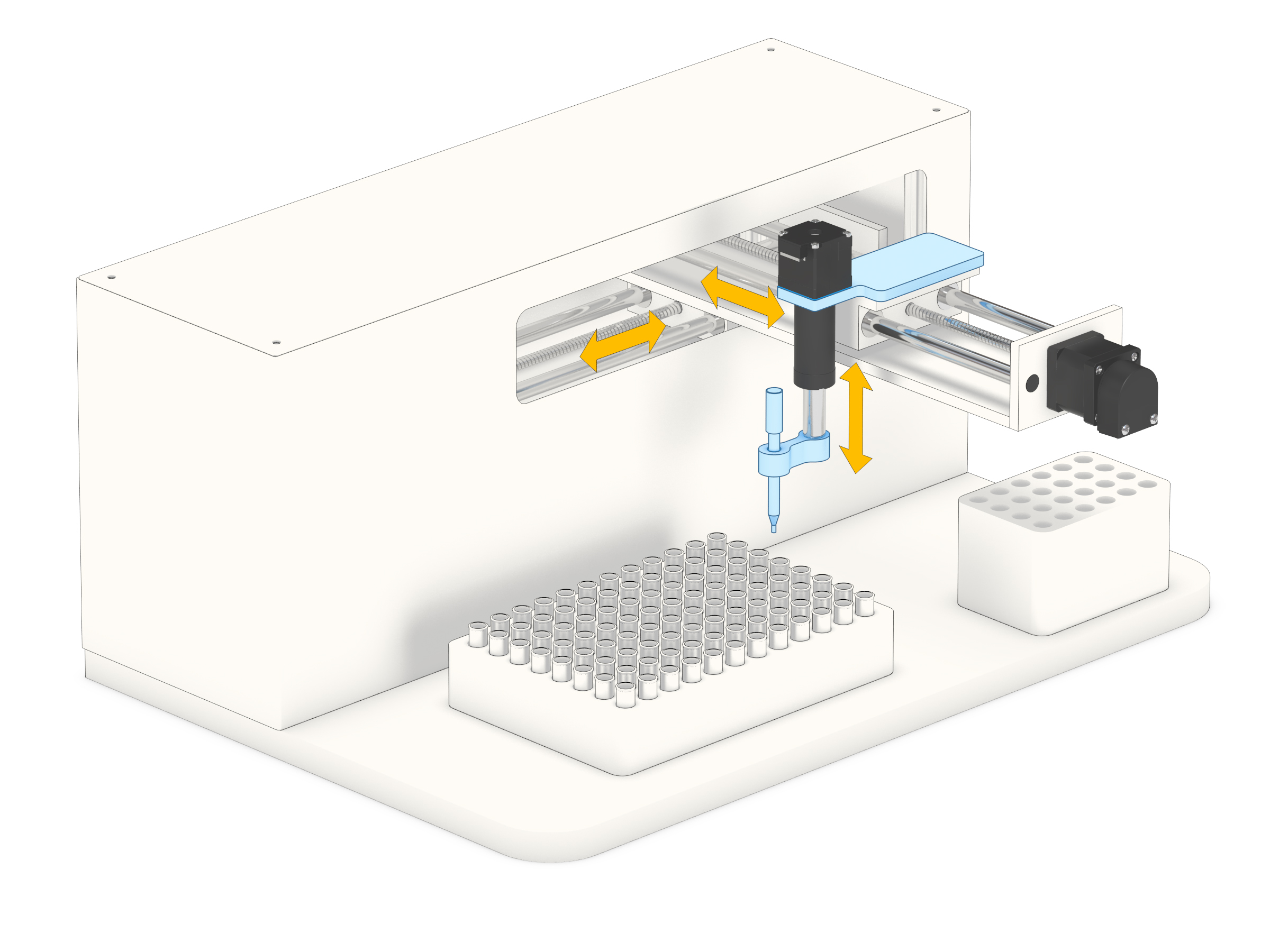
图3:自动移液机在其水平轴上使用编码器。图片由Thomson Industries,Inc.提供
使用光学旋转编码器实现闭环
许多SMLA可以通过添加旋转编码器来提供反馈。旋转编码器,也称为轴编码器,将轴的角度位置转换为模拟或数字输出信号。光学旋转编码器是向SMLA组件添加反馈功能的常用选项。图4说明了将编码器添加到SMLA如何向控制器提供反馈并共享重要运动数据,例如位置、速度或方向。
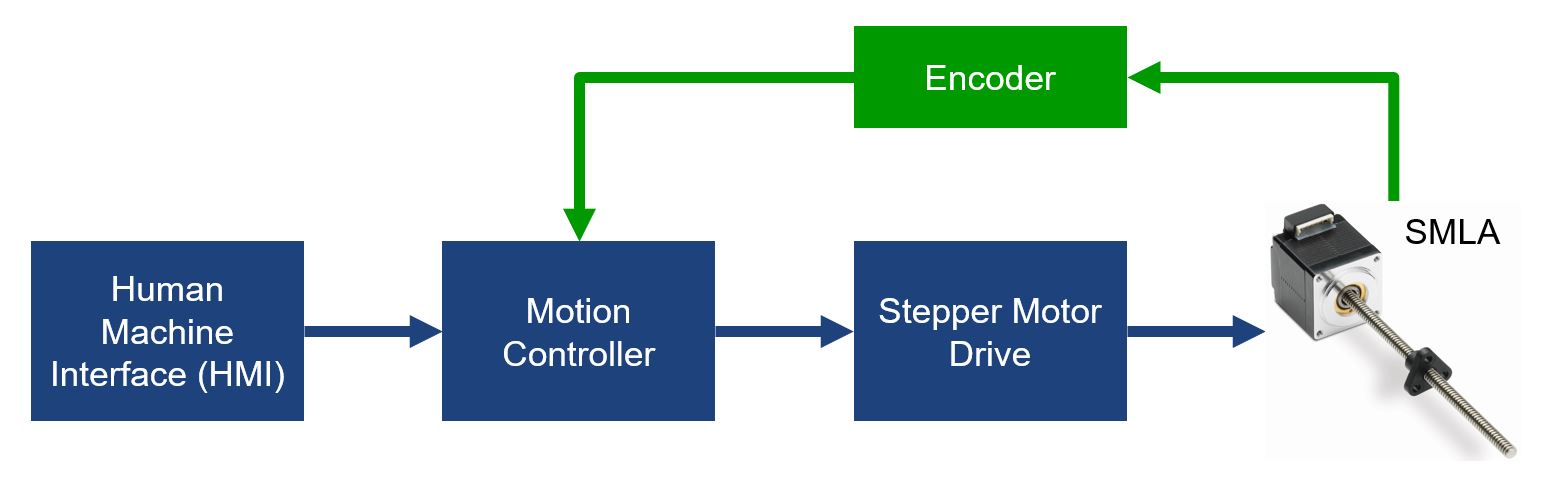
图4:用于驱动SMLA的基本闭环系统设置架构。图片由Thomson Industries,Inc.提供
使用编码器进行定位
旋转编码器有两种主要类型:增量式或绝对式。(图5)
增量式旋转编码器使用连接到轴并位于光源和光电传感器之间的旋转盘。围绕圆盘周边均匀布置有多个狭缝,光线可以通过其到达传感器,其脉冲模式代表了运动特性。
对于需要更详细的运动数据或断电时额外保护级别的应用,可使用绝对编码器。与增量编码器一样,绝对编码器也采用中心安装,与光源和光电传感器之间的电机轴一起旋转。绝对编码器不像增量编码器那样使用均匀排列的狭缝,而是在圆盘的更大表面上使用独特开口的复杂排列。这些会以特定模式遮挡光信号,即使没有归零装置,检测芯片也可以读取行程每个角度位置的高保真表征。
图5:增量编码器(左)和绝对编码器(右)的过程如上图所示。图片由Thomson Industries,Inc.提供
实施旋转编码器
在许多情况下,编码器可以集成到所有三种SMLA配置类型(MLS、MLN 和 MLA)中。只需要一个平面即可固定编码器主体和一个轴来安装光盘。轴必须是原始电机轴的延伸,以便光盘可以随之旋转以准确捕捉电机的运动,如图6所示。
< p style=“text-align:center”>
图6:将编码器安装到具有所需突出轴和安装表面的电机上。图片由Thomson Industries,Inc.提供
带有额外光学编码器的SMLA(从左到右:MLS、MLN和MLA)。图片由Thomson Industries,Inc.提供
增强配置
尽管开环SMLA系统适合许多应用,但希望实时反馈负载位置的步进电机用户应考虑在其电机中添加编码器。编码器可以提供位置反馈、速度、方向和其他实时特性数据,同时改善对负载的控制和监控。对于基本的定位反馈,用户可使用增量编码器,但如果需要高精度或在设备通电后保持位置的能力,则应考虑绝对编码器。
使用光学旋转编码器实现反馈回路的闭环不仅满足当今精密应用的需求,而且使得SMLA成为不断发展的工业4.0和数字互联创新领域的宝贵组件,确保其在下一代工业自动化中的持续相关性和有效性。